


植物表型組學研究,以輪式機器人Autolabor PM1為本體,機器人車身裝載激光雷達、超聲波、視覺傳感器等多種傳感器,基于多傳感器信息融合的環(huán)境感知技術(shù),實現(xiàn)了機器人在農(nóng)業(yè)環(huán)境下的高穩(wěn)定性運動與數(shù)據(jù)采集處理功能。

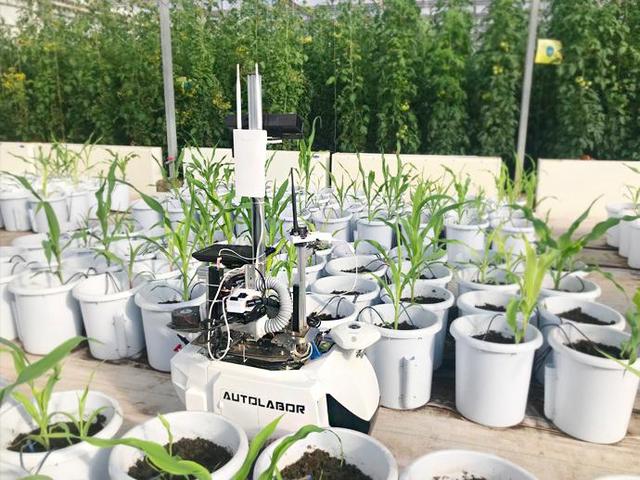
在農(nóng)業(yè)大棚中,機器人可自動巡檢、定點采集、自動避障、自動返航等。
機器人上可擴展設備安裝面,用戶可按需安裝激光雷達、深度相機、紅外相機、光譜相機、機械臂等傳感器設備,實現(xiàn)植物表型和環(huán)境數(shù)據(jù)的監(jiān)測與采集。
農(nóng)先鋒網(wǎng)聲明:凡資訊來源注明為其他媒體來源的信息,均為轉(zhuǎn)載自其他媒體,并不代表本網(wǎng)站贊同其觀點,也不代表本網(wǎng)站對其真實性負責。您若對該文章內(nèi)容有任何疑問或質(zhì)疑,請立即與網(wǎng)站(www.n3c8.cn)聯(lián)系,本網(wǎng)站將迅速給您回應并做處理。
聯(lián)系郵箱:3267146135@qq.com
聯(lián)系郵箱:3267146135@qq.com




